
Robust Multi-Agent Reinforcement Learning for Small UAS Separation Assurance under GPS Degradation and Spoofing
↳ the Control and Decision Conference (CDC) 2026
// abstract
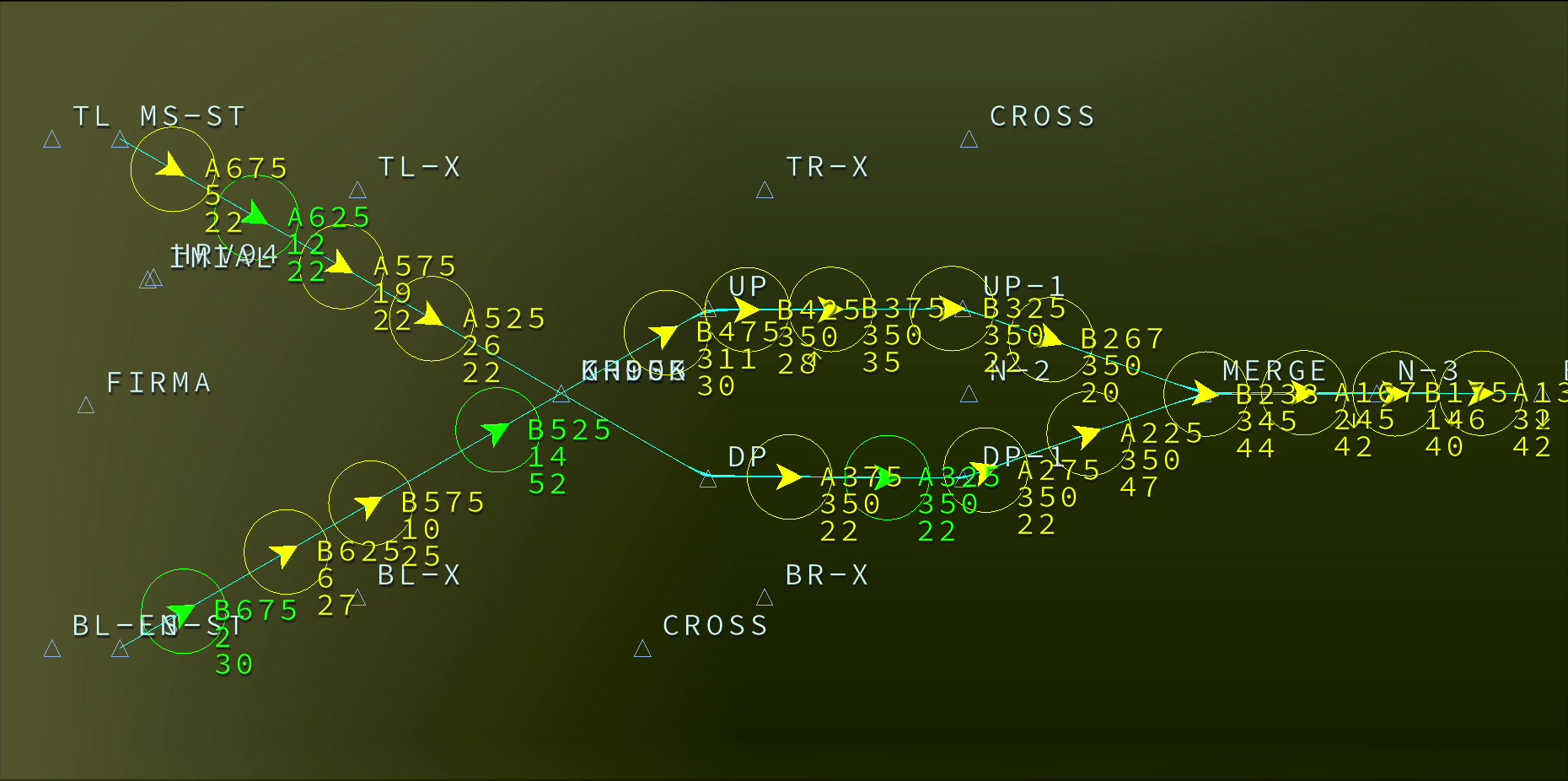
We address robust separation assurance for small Unmanned Aircraft Systems (sUAS) under GPS degradation and spoofing via Multi-Agent Reinforcement Learning (MARL). In cooperative surveillance, each aircraft (or agent) broadcasts its GPS-derived position; when such position broadcasts are corrupted, the entire observed air traffic state becomes unreliable. We cast this state observation corruption as a zero-sum game between the agents and an adversary: with probability R, the adversary perturbs the observed state to maximally degrade each agent's safety performance. We derive a closed-form expression for this adversarial perturbation, bypassing adversarial training entirely and enabling linear-time evaluation in the state dimension. We show that this expression approximates the true worst-case adversarial perturbation with second-order accuracy. We further bound the safety performance gap between clean and corrupted observations, showing that it degrades at most linearly with the corruption probability under Kullback-Leibler regularization. Finally, we integrate the closed-form adversarial policy into a MARL policy gradient algorithm to obtain a robust counter-policy for the agents. In a high-density sUAS simulation, we observe near-zero collision rates under corruption levels up to 35%, outperforming a baseline policy trained without adversarial perturbations.
// highlights
- Casts GPS corruption as a zero-sum game between the agents and an adversary that perturbs the observed state with probability R.
- Derives a closed-form worst-case perturbation — no adversarial training, linear-time in the state dimension, accurate to second order.
- Proves the clean-vs-corrupted safety gap grows at most linearly with corruption probability under KL regularization.
- Integrates the closed-form adversary into a MARL policy-gradient algorithm, achieving near-zero collisions under up to 35% corruption.
// notes
This paper introduces a Robust Multi-Agent Reinforcement Learning framework for realtime separation assurance and tactical deconfliction mechanism for small Unmanned Aerial Systems under GPS degradation and Spoofing.
This manuscript has been accepted for presentation at CDC 2026. It was also presented at the American Control Conference (ACC 2026) Workshop.
// bibtex
@misc{zongo2026robust,
title = {Robust Multi-Agent Reinforcement Learning for Small UAS Separation
Assurance under GPS Degradation and Spoofing},
author = {Alex Zongo and Filippos Fotiadis and Ufuk Topcu and Peng Wei},
year = {2026},
eprint = {2603.28900},
archivePrefix = {arXiv}
}// cite
Zongo, A., Fotiadis, F., Topcu, U., & Wei, P. (2026). "Robust Multi-Agent Reinforcement Learning for Small UAS Separation Assurance under GPS Degradation and Spoofing." arXiv preprint arXiv:2603.28900.