
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Alex B. Zongo
About me
Posts
Gaussians & the Reparameterization Trick
Published:
The Gaussian is the workhorse of generative modeling. Here’s everything you need — mean, covariance, and the one trick (x = μ + σε) that makes diffusion trainable.
Diffusion from First Principles: From Data to Noise and Back
Published:
The one idea behind every diffusion model — gradually destroy structure with noise, then learn to undo it — with an interactive forward-diffusion explorable to build intuition.
Score Matching
Published:
Denoising score matching and Tweedie’s formula — why predicting noise is the same as estimating the score, with a visual of the learned score field.
Probability You Can See: Densities, Sampling & Expectation
Published:
Random variables, densities, and the idea that an expectation is just an average over samples — the Monte-Carlo lens we use everywhere.
The Probability-Flow ODE & Fast Samplers
Published:
The deterministic ODE with the same marginals as the SDE — DDIM, sampler choices, and the step-count vs quality trade-off.
A Little Dynamics: ODEs, SDEs & Flows
Published:
Velocity fields and Euler integration, then an SDE is an ODE plus noise — the minimal dynamics needed to flow a density from noise to data.
Numerics, Evaluation & Failure Modes
Published:
Samplers, EMA, numerical stability, and how we actually measure generative models (FID, likelihood) — plus the failure modes to watch for.
Learning to Denoise: the DDPM Objective
Published:
The reverse Gaussian, predicting the noise epsilon, and the simplified training loss — why a denoiser is all you need, from scratch.
Measuring Distance Between Distributions: Likelihood & KL
Published:
Likelihood, cross-entropy, and KL divergence — why fitting a distribution means minimizing KL, and what that buys us.
The Forward Process & Noise Schedules
Published:
The Gaussian Markov chain, the closed-form forward marginal, and how the noise schedule controls how fast structure is destroyed.
Sampling: Your First Generations
Published:
Ancestral sampling from noise to data, your first generated samples on 2-D toys (and MNIST), and what the reverse trajectory looks like.
Discrete Diffusion & Scientific Applications
Published:
Diffusion beyond pixels: continuous-time Markov chains for language, and diffusion for molecules and protein structure.
Diffusion as a Special Case; Rectified Flows
Published:
Recovering diffusion from the flow-matching lens, and straightening paths (rectified flow / OT) for faster, cleaner sampling.
Conditioning, Joints & Marginals
Published:
How distributions combine and decompose: joint densities, conditioning (slicing) and marginalizing (averaging) — the grammar of probabilistic models.
Conditional Flow Matching
Published:
Conditional probability paths and vector fields, and the marginalization trick that makes flow matching trainable without simulating the flow.
From CNFs to Flow Matching
Published:
Continuous normalizing flows and the likelihood bottleneck, then the flow-matching idea: just regress a velocity field.
Conditioning & Classifier-Free Guidance
Published:
Conditioning on prompts and labels and the classifier-free guidance trick — plus the quality-vs-diversity trade-off you can dial.
Change of Variables & the Score
Published:
Transforming densities (the Jacobian and pushforwards) and a first, geometric look at the score gradient of log-density — the compass diffusion follows.
From Markov Chains to SDEs
Published:
The forward VP/VE SDE, Anderson’s reverse-time SDE, and how DDPM is just a discretization of a continuous process.
Architectures & Latent Diffusion
Published:
Time embeddings, U-Nets and Diffusion Transformers, and why moving to a VAE latent space made high-resolution generation practical.
Aircraft Dynamics and Simulation From Scratch
Published:
Building an aircraft dynamics simulator from first principles — equations of motion, aerodynamic forces, stability, and performance, implemented step by step.
Algorithms for Decision-Making: From Uncertainty to Action
Published:
An overview of algorithms for decision-making under uncertainty — from probabilistic reasoning to MDPs and POMDPs — bridging theory and practice.
Fluid Dynamics Meets Air Traffic Control: A Novel Approach to Conflict Resolution
Published:
A novel take on conflict resolution that borrows from fluid dynamics — treating air traffic as a flow field to reason about separation assurance and deconfliction.
Aircraft Traffic Control: Managing Order in a Crowded Sky
Published:
How Air Traffic Control keeps order in a crowded sky: separation, sequencing, and flow management viewed as a predictive, safety-critical control system.
miscellaneous
portfolio
Portfolio item number 1
Published:
Short description of portfolio item number 1
Portfolio item number 2
Published:
Short description of portfolio item number 2
publications
Towards Intelligent Fault-Tolerant Attitude Flight Control of Fixed-Wing Aircraft
🧠 Conference🧠 Published in Lecture Notes in Electrical Engineering, Springer Nature, International Conference in Navigation Guidance and Control (ICGNC) , 2024
This paper was submitted as part of my master thesis. It delves into the use of Reinforcement Learning to enhance fault-tolerance in fixed-wing aircraft attitude flight control. 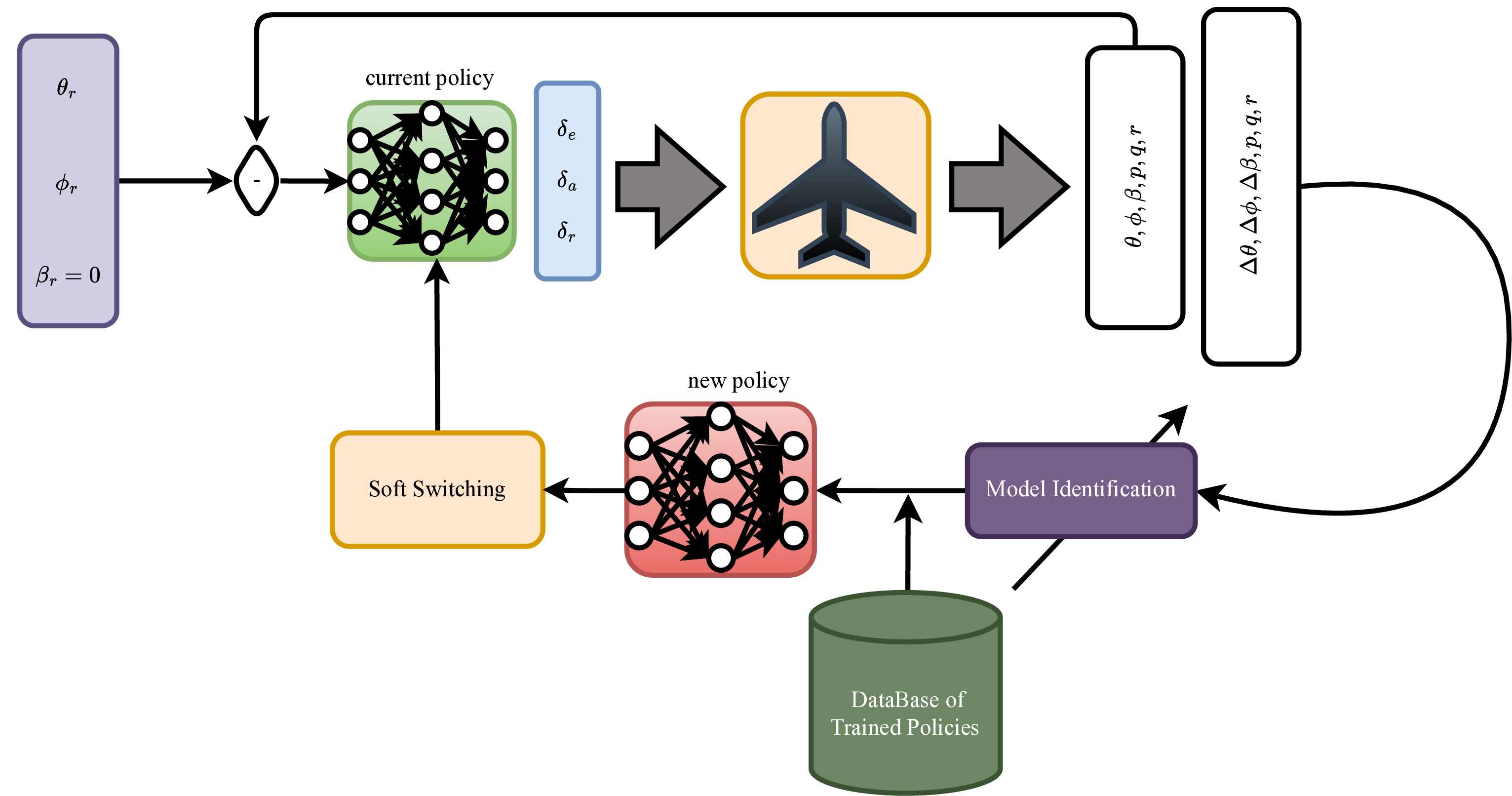
Recommended citation: Zongo, A.B., Qing, L. (2025). "Towards Intelligent Fault-Tolerant Attitude Control of Fixed-Wing Aircraft." In: Yan, L., Duan, H., Deng, Y. (eds).Advances in Guidance, Navigation and Control. ICGNC 2024. Lecture Notes in Electrical Engineering, vol 1353. Springer, Singapore.
DOI | Preprint | Slides | Bibtex
Aircraft Traffic Control: Managing Order in a Crowded Sky Permalink
📝 Blog Post🧠 Published in Scholarly blog post (Zenodo archived) , 2025
A conceptual overview of Air Traffic Control as a predictive, safety-critical control system.
Recommended citation: Zongo, A. (2025). "Aircraft Traffic Control: Managing Order in a Crowded Sky." Scholarly blog post. Available at: https://alex-zongo.github.io/posts/2025/12/aircraft-traffic-control/.
eVTOL Aircraft Energy Overhead Estimation under Conflict Resolution in High-Density Airspaces
🧠 Conference🧠 Published in the Integrated Communications Navigation, and Surveillance (ICNS) Conference , 2026
This paper characterizes electric Vertical Take-off and Landing (eVTOL) aircraft energy consumption under an autonomous tactical conflict resolution framework (the Modified Voltage Potential or MVP) in an unstructured high-density airspace. 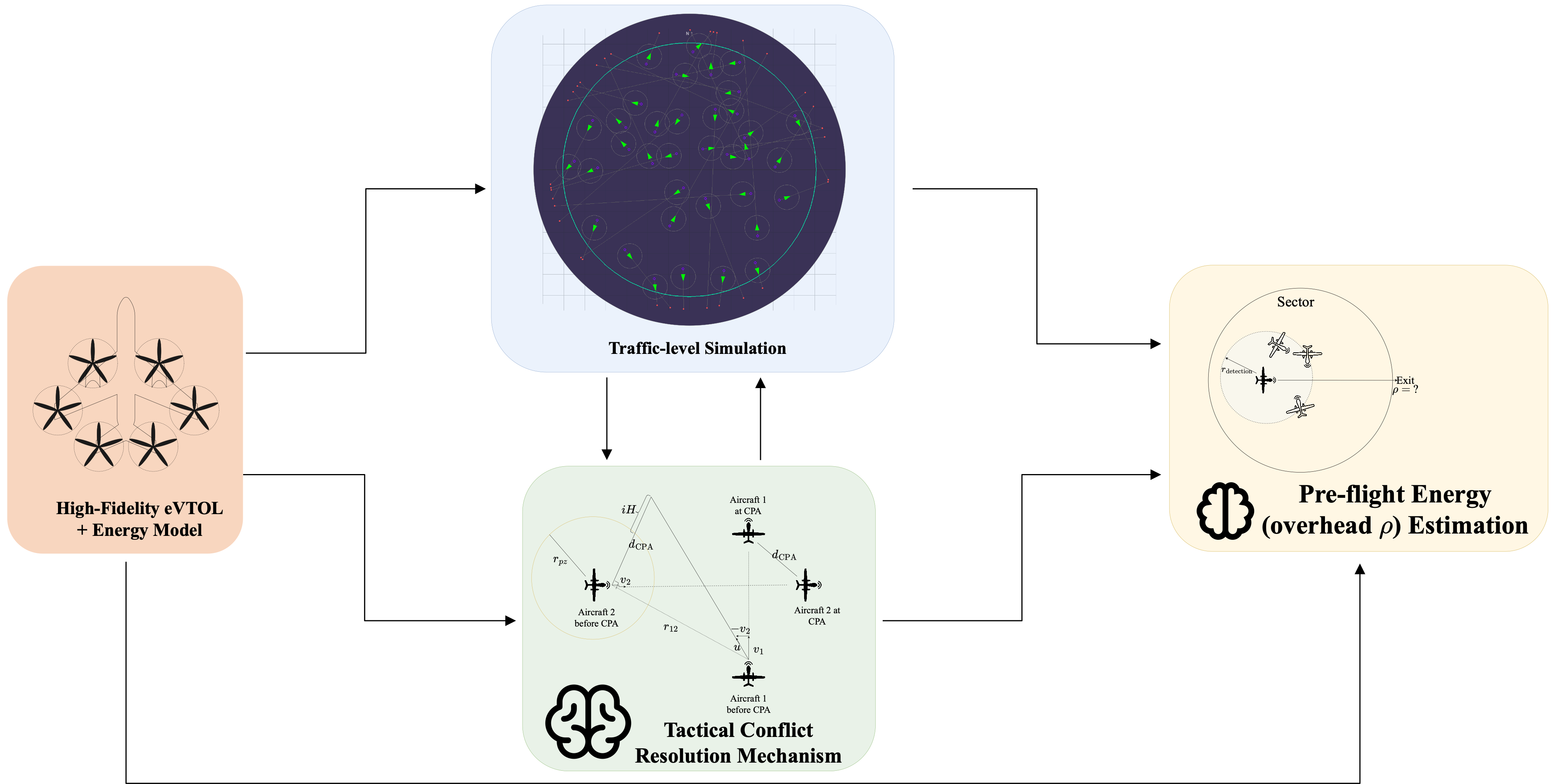
Recommended citation: Zongo, A., & Wei, P. (2026). "eVTOL Aircraft Energy Overhead Estimation under Conflict Resolution in High-Density Airspaces." arXiv preprint arXiv:2604.06093.
Slides
Runtime Safety Filtering for Learned sUAS Separation Policies under GNSS Degradation
✔️ Accepted✅ To be presented at the Digital Avionics Systems Conference (DASC) 2026 , 2026
This paper is addresses realtime separation assurance and tactical deconfliction mechanisms of small Unmanned Aerial Systems via Multi-Agent Reinforcement Learning under GPS degradation and Spoofing.
Fine-Tuning Large Language Models for Cooperative Tactical Deconfliction of Small Unmanned Aerial Systems
🧠 Conference🧠 Published in The 3rd Workshop on Multi-Agent Embodied Intelligent Systems Meet Agentic-AI era: Opportunities, Challenges and Futures (MEIS@CVPR 2026) , 2026
This paper presents a simulation-to-language data generation pipeline using BlueSky ATM for fine-tuning Large Language Models on cooperative tactical deconfliction of small UAS, achieving improved decision accuracy and reduced near mid-air collisions through parameter-efficient fine-tuning (LoRA, GRPO). 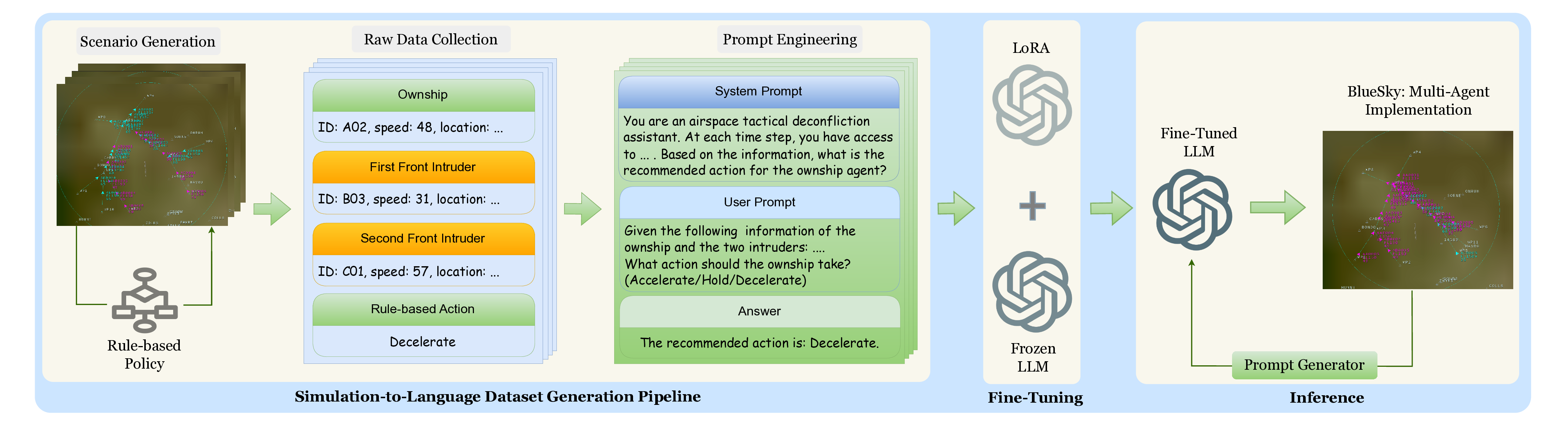
Recommended citation: Sharifi, I., Zongo, A., & Wei, P. (2026). " Fine-Tuning Large Language Models for Cooperative Tactical Deconfliction of Small Unmanned Aerial Systems. " In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (pp. 1067-1076).
DOI
Robust Multi-Agent Reinforcement Learning for Small UAS Separation Assurance under GPS Degradation and Spoofing
⏳ Under Review⏳ Submitted to the Control and Decision Conference (CDC) 2026 , 2026
This paper is addresses realtime separation assurance and tactical deconfliction mechanisms of small Unmanned Aerial Systems via Multi-Agent Reinforcement Learning under GPS degradation and Spoofing. 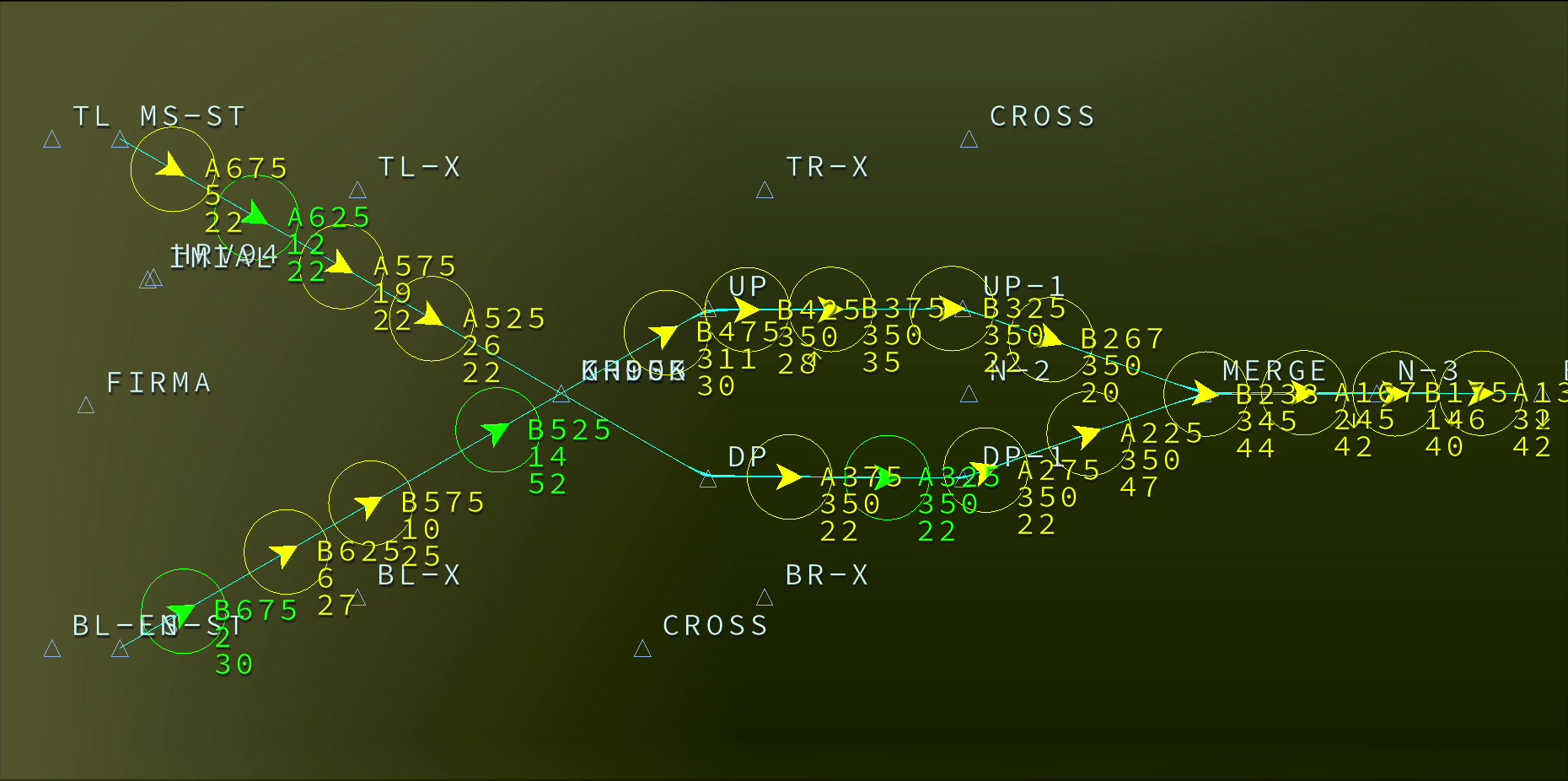
talks
Intelligent Control and Reinforcement Learning Permalink
Published:
Presented my research on intelligent fault-tolerant control of fixed-wing aircraft at Tsinghua University’s 739th Ph.D Academic Discussion.
Conference Proceeding talk on Intelligent Control: Towards Intelligent Fault-Tolerant Attitude Flight Control of Fixed-Wing Aircraft Permalink
Published:
Conference proceedings talk on Towards Intelligent Fault-Tolerant Attitude Flight Control of Fixed-Wing Aircraft.
Le Parcous d’un Burkinabé dans le domaine de l’Aéronautique et de l’Espace
Published:
Shared my educational and professional journey as a Burkinabé in aeronautics & space to inspire the next generation.
Conference Talk — eVTOL Aircraft Energy Overhead Estimation under Conflict Resolution in High-Density Airspaces
Published:
Presented our analysis of eVTOL energy overhead under MVP-based tactical conflict resolution in high-density airspace, including an ML model for reserve-energy estimation.
Poster — Robust MARL for Small UAS Separation Assurance under GPS Degradation & Spoofing
Published:
Presented our robust multi-agent reinforcement learning approach for sUAS separation assurance under GPS degradation and spoofing at the ACC 2026 Autonomy in Transportation workshop.
Poster — Fine-Tuning LLMs for Cooperative Tactical Deconfliction of Small UAS
Published:
Presented our work on fine-tuning Large Language Models (LoRA / GRPO) for cooperative tactical deconfliction of small UAS, built on a BlueSky simulation-to-language pipeline.
teaching
Teaching Assistant
Undergraduate course, GWU, Department of Mechanical and Aerospace Engineering, 2025
Teaching Assistant for Linear System Dynamics — led recitations, graded assignments and exams, and mentored undergraduates in control theory.
Research Mentor
Research mentorship, Intelligent Aerospace Systems Laboratory (IASL), GWU, 2025
Mentoring undergraduate and M.S. students on air/maritime traffic simulation and multi-agent RL for separation assurance and tactical deconfliction.