Portfolio item number 1
Published:
Short description of portfolio item number 1

Published:
Short description of portfolio item number 1
Published:
Short description of portfolio item number 2
🧠 Published in Lecture Notes in Electrical Engineering, Springer Nature, International Conference in Navigation Guidance and Control (ICGNC) , 2024
This paper was submitted as part of my master thesis. It delves into the use of Reinforcement Learning to enhance fault-tolerance in fixed-wing aircraft attitude flight control. 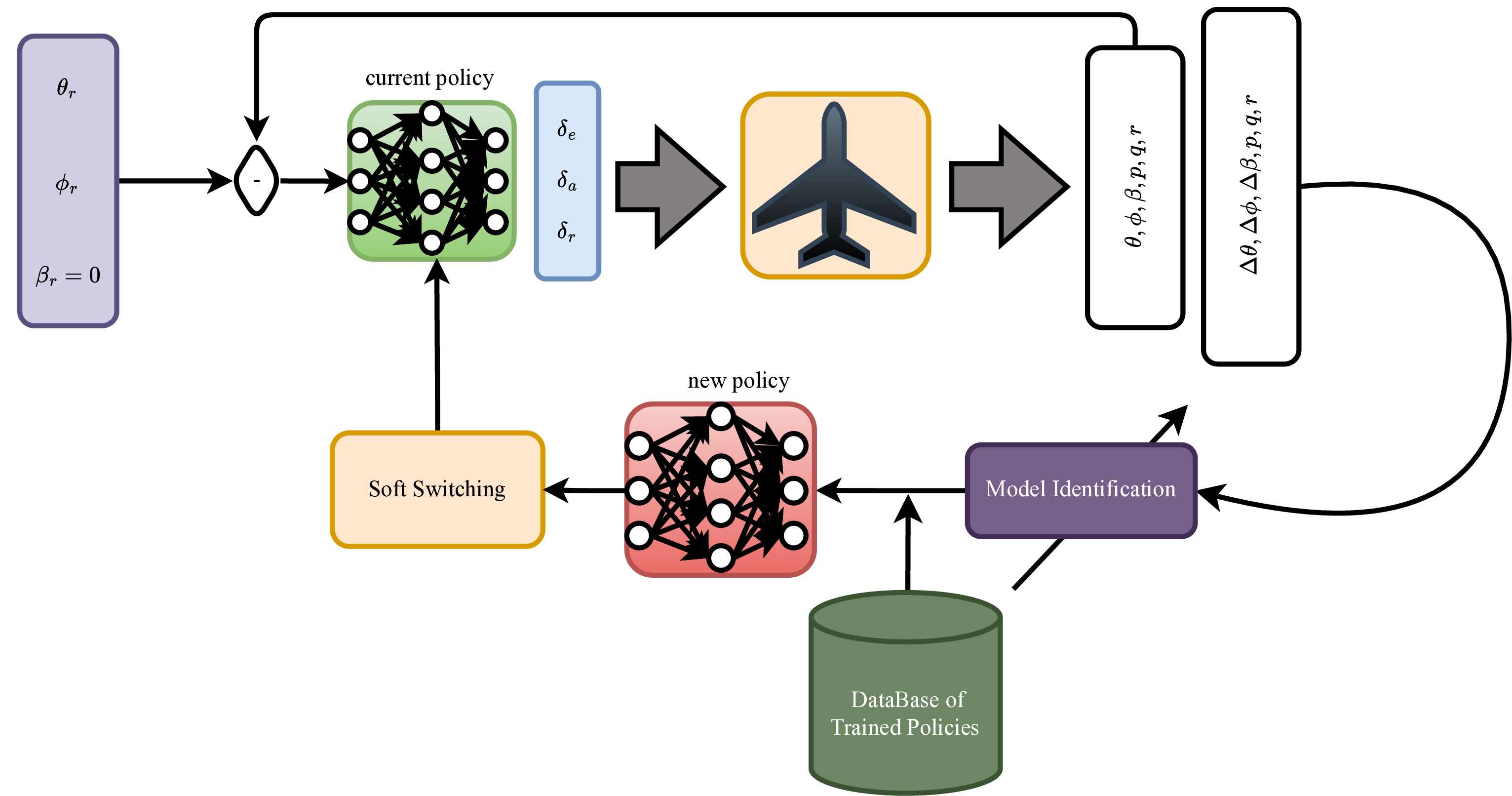
Recommended citation: Zongo, A.B., Qing, L. (2025). "Towards Intelligent Fault-Tolerant Attitude Control of Fixed-Wing Aircraft." In: Yan, L., Duan, H., Deng, Y. (eds).Advances in Guidance, Navigation and Control. ICGNC 2024. Lecture Notes in Electrical Engineering, vol 1353. Springer, Singapore.
DOI | Preprint | Slides | Bibtex
🧠 Published in Scholarly blog post (Zenodo archived) , 2025
A conceptual overview of Air Traffic Control as a predictive, safety-critical control system.
Recommended citation: Zongo, A. (2025). "Aircraft Traffic Control: Managing Order in a Crowded Sky." Scholarly blog post. Available at: https://alex-zongo.github.io/posts/2025/12/aircraft-traffic-control/.
🧠 Published in the Integrated Communications Navigation, and Surveillance (ICNS) Conference , 2026
This paper characterizes electric Vertical Take-off and Landing (eVTOL) aircraft energy consumption under an autonomous tactical conflict resolution framework (the Modified Voltage Potential or MVP) in an unstructured high-density airspace. 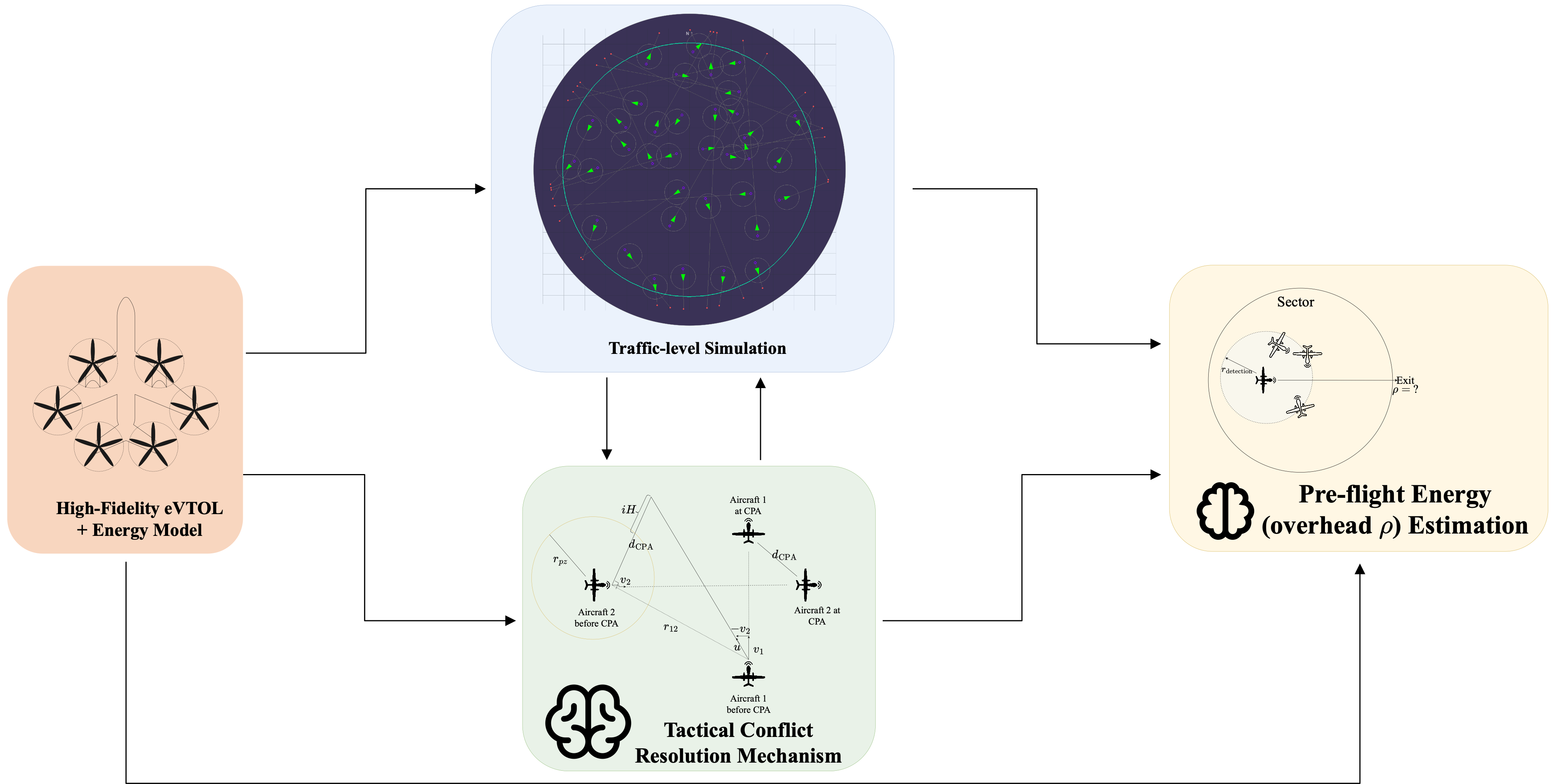
Recommended citation: Zongo, A., & Wei, P. (2026). "eVTOL Aircraft Energy Overhead Estimation under Conflict Resolution in High-Density Airspaces." arXiv preprint arXiv:2604.06093.
Slides
✅ To be presented at the Digital Avionics Systems Conference (DASC) 2026 , 2026
This paper is addresses realtime separation assurance and tactical deconfliction mechanisms of small Unmanned Aerial Systems via Multi-Agent Reinforcement Learning under GPS degradation and Spoofing.
🧠 Published in The 3rd Workshop on Multi-Agent Embodied Intelligent Systems Meet Agentic-AI era: Opportunities, Challenges and Futures (MEIS@CVPR 2026) , 2026
This paper presents a simulation-to-language data generation pipeline using BlueSky ATM for fine-tuning Large Language Models on cooperative tactical deconfliction of small UAS, achieving improved decision accuracy and reduced near mid-air collisions through parameter-efficient fine-tuning (LoRA, GRPO). 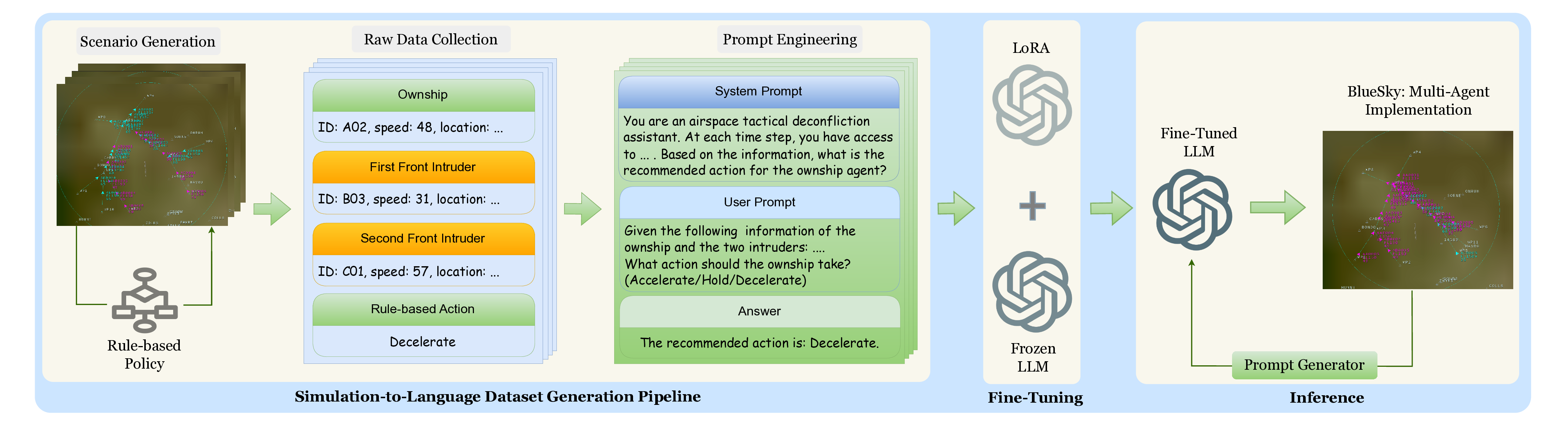
Recommended citation: Sharifi, I., Zongo, A., & Wei, P. (2026). " Fine-Tuning Large Language Models for Cooperative Tactical Deconfliction of Small Unmanned Aerial Systems. " In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (pp. 1067-1076).
DOI
⏳ Submitted to the Control and Decision Conference (CDC) 2026 , 2026
This paper is addresses realtime separation assurance and tactical deconfliction mechanisms of small Unmanned Aerial Systems via Multi-Agent Reinforcement Learning under GPS degradation and Spoofing. 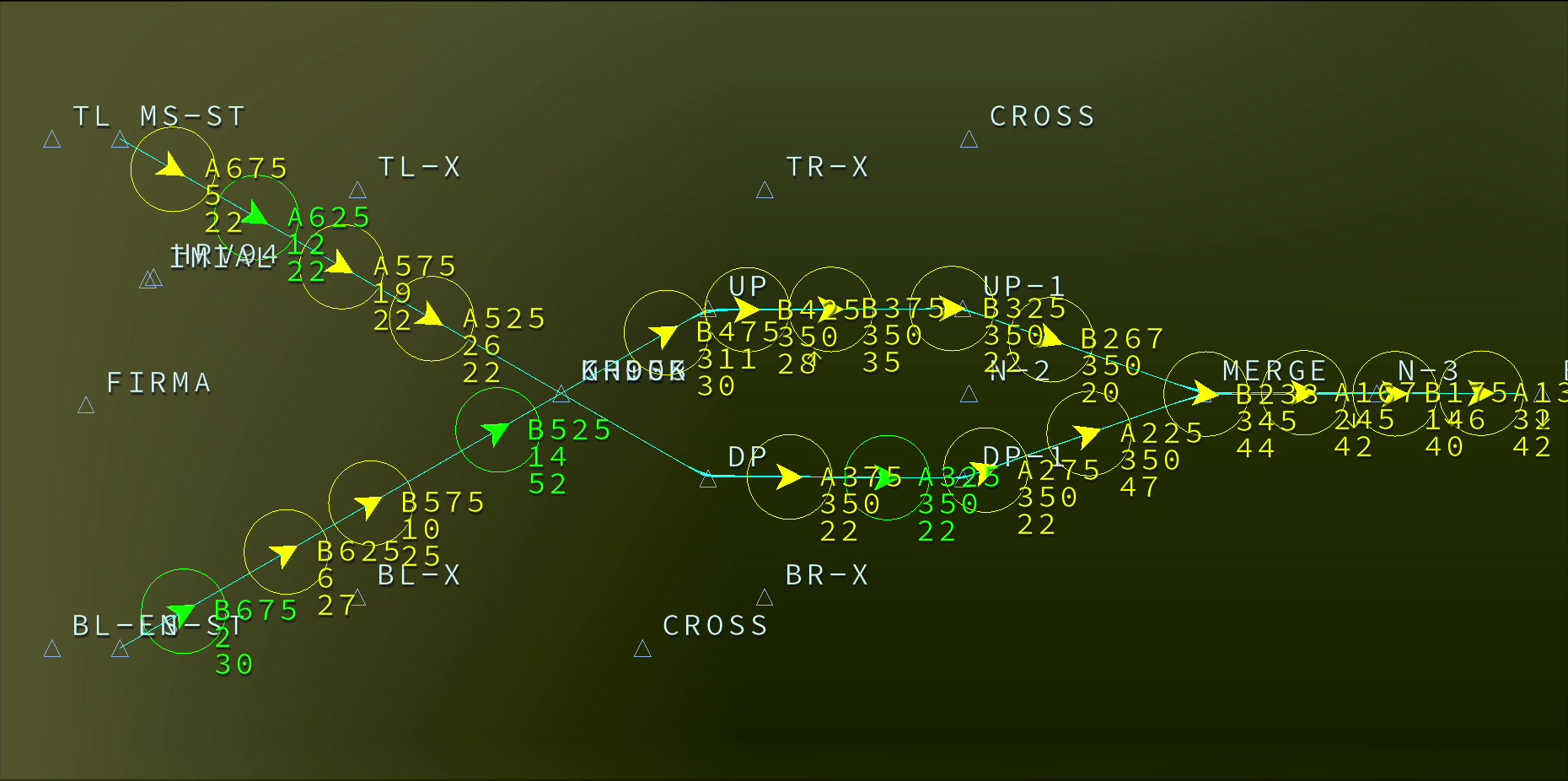
Published:
Presented my research on intelligent fault-tolerant control of fixed-wing aircraft at Tsinghua University’s 739th Ph.D Academic Discussion.
Published:
Conference proceedings talk on Towards Intelligent Fault-Tolerant Attitude Flight Control of Fixed-Wing Aircraft.
Published:
Shared my educational and professional journey as a Burkinabé in aeronautics & space to inspire the next generation.
Published:
Presented our analysis of eVTOL energy overhead under MVP-based tactical conflict resolution in high-density airspace, including an ML model for reserve-energy estimation.
Published:
Presented our robust multi-agent reinforcement learning approach for sUAS separation assurance under GPS degradation and spoofing at the ACC 2026 Autonomy in Transportation workshop.
Published:
Presented our work on fine-tuning Large Language Models (LoRA / GRPO) for cooperative tactical deconfliction of small UAS, built on a BlueSky simulation-to-language pipeline.
Undergraduate course, GWU, Department of Mechanical and Aerospace Engineering, 2025
Teaching Assistant for Linear System Dynamics — led recitations, graded assignments and exams, and mentored undergraduates in control theory.
Research mentorship, Intelligent Aerospace Systems Laboratory (IASL), GWU, 2025
Mentoring undergraduate and M.S. students on air/maritime traffic simulation and multi-agent RL for separation assurance and tactical deconfliction.